Pojav turbulentnih motorjev zaradi potrebe po ustvarjanju električnega stroja z mnogimi prednostmi. Turbo-reaktivni motor je naprava brez kolektorja, katere funkcijo prevzema elektronika.
BCEPT - polni delovni elektromotorji z enosmernim tokom, lahko imajo moč, na primer 12, 30 voltov.
Izbira ustreznega motorja
Za prevzem enote je treba primerjati načelo delovanja in značilnosti kolektorskih in kolektorskih motorjev.

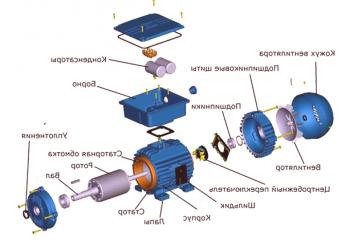
Od leve proti desni: kolektorski motor, motor imobilizatorja FC 28-12
Zbiralniki so manjši, vendar razvijajo nizko hitrost vrtenja navora. Delujejo od enosmernega toka, imajo majhno težo in velikost, razpoložljiva popravila za zamenjavo delov. Izraz negativne kakovosti se kaže pri sprejemanju ogromne količine revolucij. Krtače so v stiku s kolektorjem, kar povzroča trenje, ki lahko poškoduje mehanizem. Učinkovitost enote se zmanjša.
Krtače ne potrebujejo le popravila zaradi hitre obrabe, ampak lahko povzročijo tudi pregrevanje mehanizma.
Glavna prednost enosmernega motorja brez kolektorja je odsotnost kontaktov navora in preklapljanje. Pomeni odsotnost virov izgube, kot pri motorjih s trajnimi magneti. Njihove funkcije opravljajo tranzistorji ILO. Prej je bila njihova vrednost visoka, zato niso bili na voljo. Danes je cena postala sprejemljiva, stopnje pa so se znatno izboljšale. V odsotnosti radiatorskega sistema je moč omejena na 2,5 do 4 vata, tok pa na 10 do 30 amperov. Učinkovitost električnih motorjev je zelo visoka.
Druga prednost je nastavitev mehanike. Os je nameščena na ležajih. V strukturi ni zlomljenih in izbrisanih elementov.
Edina pomanjkljivost je draga elektronska kontrolna enota.

CNC vreteno Porter Cable 690
Upoštevajte primer CNC mehanike z vretenom.
Zamenjava kolektorskega motorja na pregradi bo zaščitila pred zlomom vretena za CNC. Pod vretenom je puhalo z desnim in levim zavojem navora. Vreteno za CNC ima veliko moč. Hitrost vrtilnega momenta se krmili s servo krmilnikom, hitrost pa krmili avtomatski krmilnik. Stroški CNC z vreteno približno 4 tisoč rubljev.
Načelo dela
Glavna značilnost mehanizma je odsotnost zbiralca. V vreteno so nameščeni trajni magneti in rotor. Okoli njega so žični naviti z različnimi magnetnimi polji. Razlika med 12 voltnimi kolektorskimi motorji je senzor krmiljenja rotorja, ki se nahaja nanjemu. Signali se dovajajo krmilniku hitrosti.
Naprava BCEPT
Razporeditev magnetov znotraj statorja se običajno uporablja za dvofazne motorje z majhnim številom polov. Načelo navora okrog statorja se uporablja, če je potrebno za pridobitev dvofaznega motorja z majhnimi obrati.
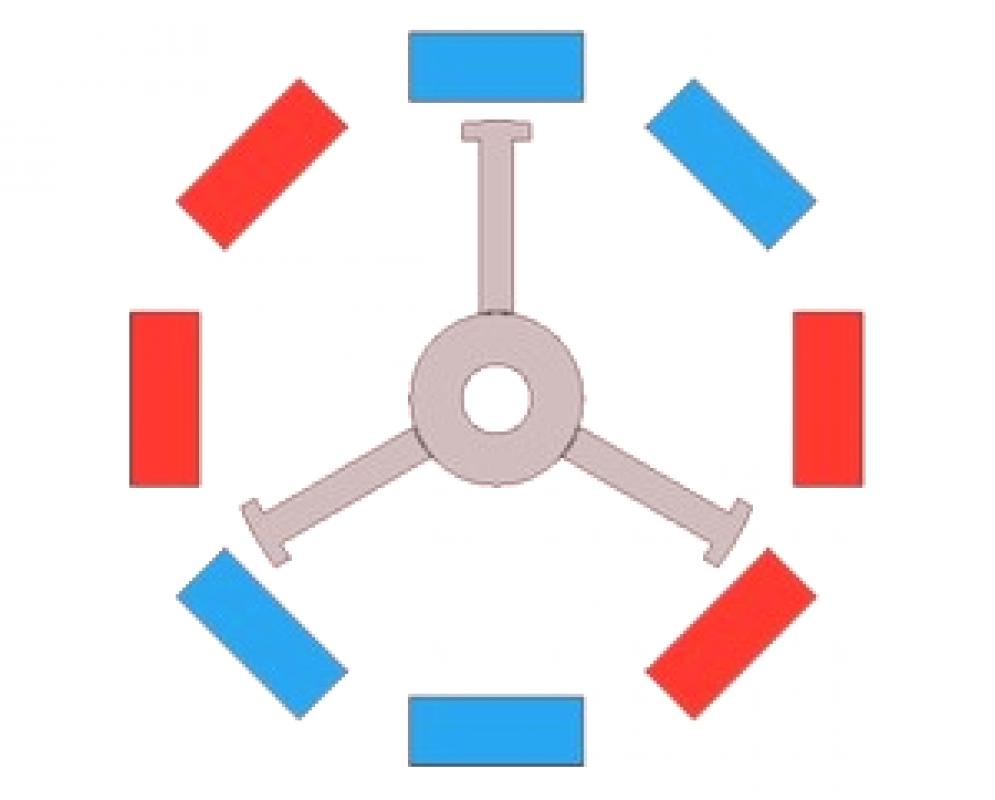 Na rotorju so štirje poli. Nastavljeni so magneti v obliki pravokotnika, izmenični poli. Vendar pa ni vedno število enako številu polov magnetov, ki je lahko 12, 14, vendar bi moralo biti število polov enakomerno.
Na rotorju so štirje poli. Nastavljeni so magneti v obliki pravokotnika, izmenični poli. Vendar pa ni vedno število enako številu polov magnetov, ki je lahko 12, 14, vendar bi moralo biti število polov enakomerno.
Na sliki je prikazanih 8 magnetov, ki tvorijo 4 pole. Trenutek sile je odvisen od moči magnetov.
Senzorji in njihova odsotnost
Regulatorji hoje so razdeljeni v dve skupini: s senzorjem položaja rotorja in brez njega.
Močne sile se uporabljajo za navitja motorja na posebnem položaju rotorja, ki se določi z elektronskim sistemom, ki uporablja pozicijski senzor. Prihajajo v različnih vrstah. Priljubljen krmilnik kapi je diskretni Hallov senzor. V motorju se bodo uporabljali trije senzorji za tri faze 30 voltov. Elektronska enota ima stalno podatke o stanju rotorja in pravočasno pošlje napetost zahtevanemu navitju.
Hallov senzor
 Najpogostejše prilagoditve, ki spreminjajo svoje ugotovitve pri preklapljanju navitij.
Najpogostejše prilagoditve, ki spreminjajo svoje ugotovitve pri preklapljanju navitij.
Naprava z odprto zanko meri tok, frekvenco vrtenja. PWM kanali so priključeni na dno krmilnega sistema.
Trije vhodipriključitev Hallovega senzorja. V primeru spremembe Hallovega senzorja se začne proces prekinitve. Da bi zagotovili hiter odziv na prekinitveno obdelavo, je Hallov senzor povezan z manjšim pristaniščem vrat.
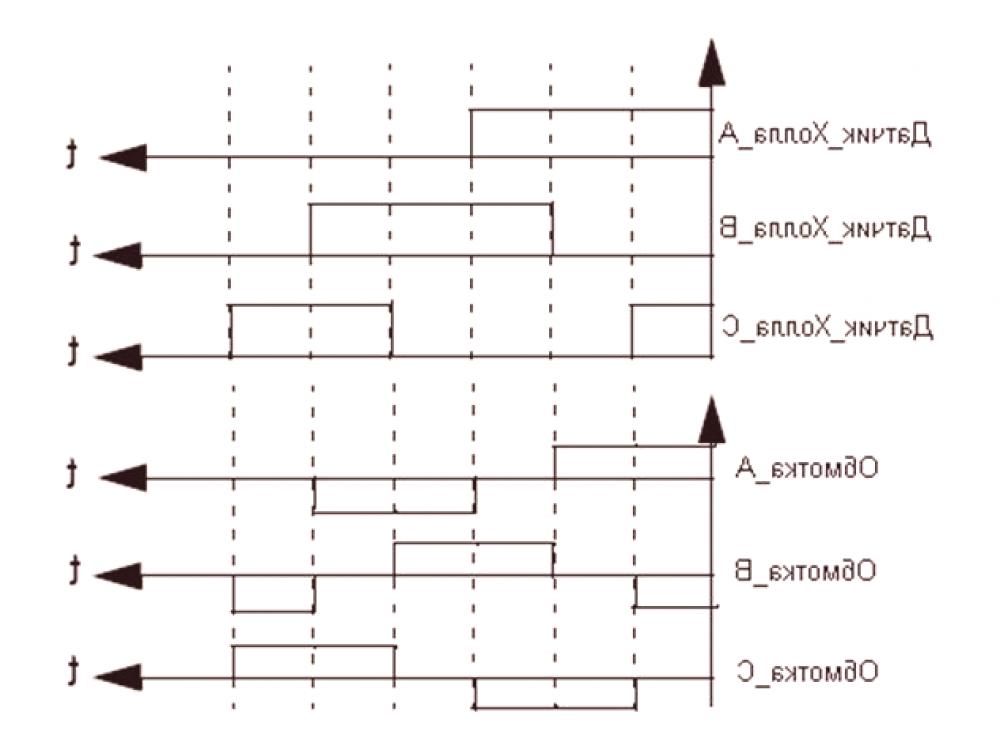
Signali Hall senzorja pri vrtenju
Uporaba pozicijskega senzorja z mikrokrmilnikom
AVR mikrokrmilniki podjetja Atmel
Krmilnik moči kaskade je v jedru jedra AVR, ki zagotavlja kompetentno kontrolo DC kolektorskega motorja. AVR je čip za izvajanje določenih nalog.
Načelo delovanja regulatorja je lahko s senzorjem in brez njega. Program plošče AVR opravlja:
- zagnati motor čim prej brez uporabe zunanjih pomožnih naprav;
- za nadzor hitrosti enega zunanjega potenciometra.

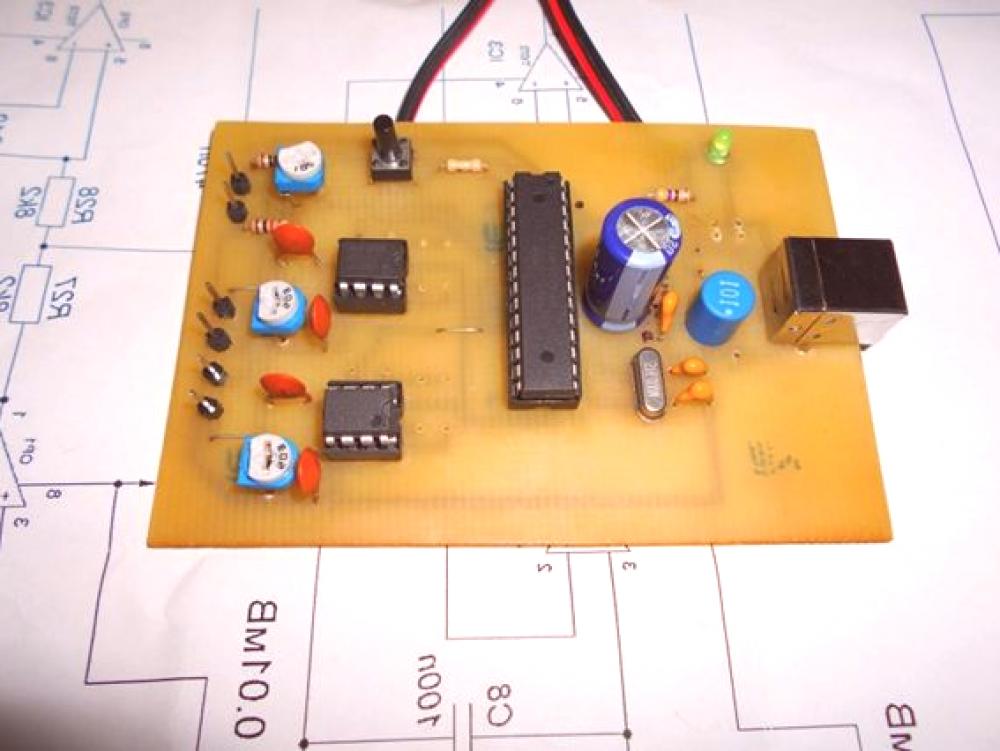
Elektronska krmilna enota za CMA LG 6871ER1007C
Ločena vrsta samodejnega nadzora sm, ki se uporablja v pralnih strojih.
Pomanjkanje senzorja
 Za določitev položaja rotorja je treba izmeriti napetost na neuporabljenem navitju. Ta metoda se uporablja za rotacijo motorja, sicer ne bo delovala.
Za določitev položaja rotorja je treba izmeriti napetost na neuporabljenem navitju. Ta metoda se uporablja za rotacijo motorja, sicer ne bo delovala.
Enaki regulatorji hitrosti so lažji, kar pojasnjuje njihovo široko uporabo.
Regulatorji imajo naslednje lastnosti:
- vrednost maksimalnega enosmernega toka;
- vrednost največje delovne napetosti;
- število največjih obratov;
- upornost tipk za napajanje;
- frekvenca pulza.
AtPriključitev krmilnika je pomembna za čim krajše žice. Zaradi nastopa metov na začetku toka. Če je žica dolga, lahko pride do napak pri določanju položaja rotorja. Zato se krmilniki prodajajo z žico 12 - 16 cm.
Krmilniki imajo veliko nastavitev programske opreme:
- nadzor zaustavitve motorja;
- gladko ali trdo izklop;
- zaviranje in gladko zaustavitev;
- pred močjo in učinkovitostjo;
- mehak, trden, hiter začetek;
- trenutna omejitev;
- plinski način;
- sprememba smeri.
Krmilnik LB11880
Krmilnik LB11880, ki je prikazan na sliki, vsebuje gonilnik za kolektorski motor velike moči, kar pomeni, da lahko motor zaženete neposredno na čip brez dodatnih gonilnikov.
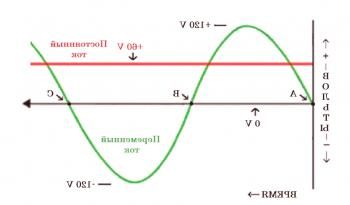
Koncept frekvence PWM
Ko so tipke vklopljene, se motor napolni s polno obremenitvijo. Enota doseže največje hitrosti. Za delovanje motorja morate zagotoviti regulator moči. Točno to se izvede s pulzno-širinsko modulacijo (PWM).
Potreben je želeni ključ za odpiranje in zapiranje. Napetost se spreminja od nič do delovanja. Za nadzor prometa je potrebno za signale ključev uporabiti PWM signal.
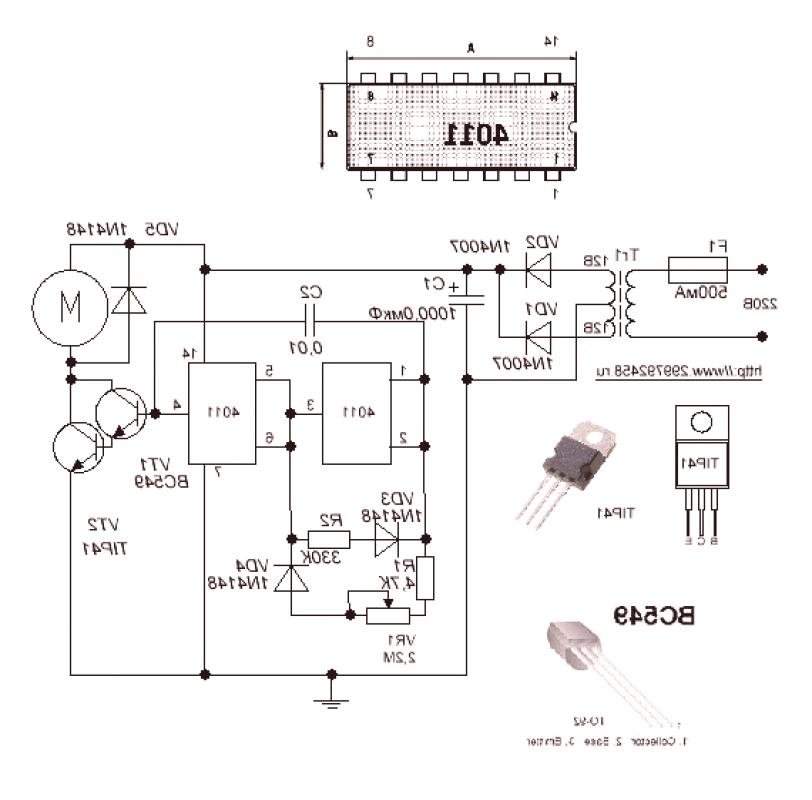
Shema regulatorja enosmernega motorja za napetost 12 voltov
PWM signal se lahko oblikuje z več sklepi. Ali pa ustvarite PIM za ločen ključni program. Shema postane lažja. Signal PWM ima 4-80 kilohertz.
Povečanje frekvencevodi do večjega števila prehodnih procesov, kar ima za posledico dodelitev toplote.Višina frekvence PWM poveča število prehodnih procesov, kar povzroči izgubo ključev.Majhna frekvenca ne zagotavlja zahtevane gladkosti nadzora.
Za zmanjšanje izgube ključev v prehodnih procesih se signali PWM oddajata ločeno na zgornje ali spodnje tipke.Neposredne izgube se izračunajo po formuli P = R * I2, kjer je P zmožnost izgube, R je upor ključa, I je jakost toka.
Manj odpornosti zmanjšuje izgube, povečuje učinkovitost.
arduino sistem
Pogosto se računalniška platforma strojne opreme arduino pogosto uporablja za krmiljenje motorjev brez posadke.Osnova je odbor in razvojno okolje v jeziku Wiring.
Plošča Arduino vključuje mikrokrmilnik Atmel AVR in elementarno vezavo programskih vmesnikov in vmesnikov vezja.Plošča ima regulator napetosti.Serial Arduino Card je preprosta inverting shema za pretvorbo signalov iz ene ravni v drugo.Programi se namestijo prek USB-ja.Nekateri modeli, kot je Arduino Mini, zahtevajo dodatno plačilo za programiranje.
Programski jezik Arduino uporablja standardno obdelavo.Nekateri arduino modeli omogočajo upravljanje več strežnikov hkrati.Programska oprema obdeluje procesor in pripravlja AVR.
Težave s krmilnikom se lahko pojavijo zaradi okvare napetosti in preobremenitve.
Vgradnja motorja

Motorji 45/50/58
Motor motor za montažo motorja.Velja za nastavitve motorja.Motor je medsebojno povezanpalice in elementi okvirja. Motorji so ploski, prostorski elementi. Motor z enim motorjem je 30 voltov ali več naprav. Motorji električnega kroga so sestavljeni iz niza palic. Motor je vgrajen v kombinaciji s kmetijskimi in okvirnimi elementi.
Neprebojni enosmerni motor je nepogrešljiva enota, ki se uporablja tako doma kot v industriji. Na primer CNC strojni stroj, medicinska oprema, avtomobilski mehanizmi.
BCEPT odlikuje zanesljivost, visoko natančnost delovanja, inteligentno avtomatsko krmiljenje in regulacija.